
 ȫ���y(t��ng)һ�ͷ��ᾀ��
ȫ���y(t��ng)һ�ͷ��ᾀ��- �ИI(y��)��
- ��˾�ӑB(t��i)
������
 ��ԃ�ᾀ��
��ԃ�ᾀ��15220244984
��ַ�������Ќ���ʯ�rˮ����Ĺ��I(y��)�^(q��)��¡���I(y��)�@9��5��
�Ԓ��15220244984
���棺15220244984
E-mail��115566838@qq.com
��������S���˹��������d���o���{���܇�@����Խ��Խ����P(gu��n)ע�����o���{�܇�v��Ҫ������·�����P(gu��n)�I�ļ��g(sh��)���ھ��_���լF(xi��n)��(sh��)�Џ�(f��)�s�Ľ�ͨ��r���@��һ���ͱ��ʹ�����_(d��)�b�á����ں��ײ����_(d��)�������z���^���������_(d��)�����֪���Ծ��о��x�h(yu��n)���ɿ��Ըߡ����ܹ⾀���m��Ӱ푵����c(di��n) [1]���e�Dz����ܐ�������Ӱ푲����܉�ȫ�������������o���{����g(sh��)������x��

���ײ����_(d��)������Ŀ��(bi��o)��늴Ų��ķ�����l(f��)�F(xi��n)���y��Ŀ��(bi��o)λ�ã�����M�s�����ⲿ�h(hu��n)���o���ײ����_(d��)��֪����o�������̓�����}����ˣ�����ᘌ� L3 ���Ԅ��{��܇������ 77 GHz �L����ײ����_(d��)���о���ײ����_(d��)�ڸ�֪�R�e�е���Ҫ���}�M(j��n)���˷���������˽�Q���ߣ�����m(x��)���ײ����_(d��)�đ�(y��ng)�ú͜yԇ�ṩ������
2. ���ײ����_(d��)�R�e���}����
2.1 ���ײ����_(d��)����ԭ��
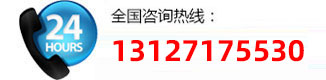
�D 1 ���ײ����_(d��)ϵ�y(t��ng)��܇����ʾ��
L3 ���Ԅ��{��܇܇���܇������� 2 ö�L����ײ����_(d��)�� 4 ö�о���ײ����_(d��)���Ɍ�(sh��)�F(xi��n)܇�� 360�� �h(hu��n)����֪�������w�����ײ����_(d��)ϵ�y(t��ng)��܇���÷�����̽�y������D 1 ��ʾ��
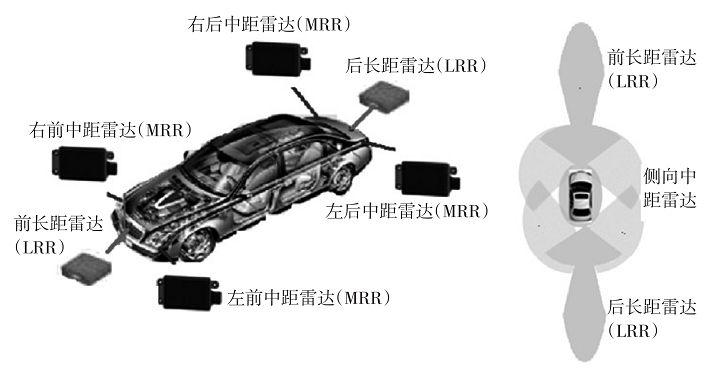
�D 2 �������_(d��)ϵ�y(t��ng)�W(w��ng)�j(lu��)�ܘ�(g��u)ʾ��
���ײ����_(d��)ͨ�^ CAN ��̖�c�Ԅ��{�������M(j��n)�н������D 2���������֪�Y(ji��)��ݔ������һ��Ҏ(gu��)������ģ�K����ݔ������(sh��)��� 1 �ͱ� 2 ���С�
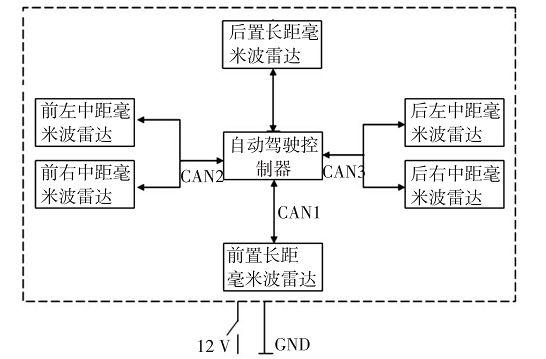
�� 1 �L����ײ����_(d��)ݔ������(sh��)

�� 2 �о���ײ����_(d��)ݔ������(sh��)
�ɱ� 1 �ͱ� 2 ��֪��������������������ҕ�X���������������_(d��)�������������ײ����_(d��)�����ٶȾ����^�ߡ��Ƿֱ��������^�͵����c(di��n)�������о����_(d��)���L�����_(d��)�Ķ̾�ģʽ�Ƕȸ��w��������������Ƿֱ����M(j��n)һ���½���
 ����朽�
����朽� 


